Ყველა პროდუქი
-
 Გაშლილი დოზირების მანქანა
Გაშლილი დოზირების მანქანა
-
 Ჩრდილოვანი მანქანა
Ჩრდილოვანი მანქანა
-
 Ლაზერის გაჭრვილობა
Ლაზერის გაჭრვილობა
-
 Პრეს-ნაკურნის მანქანა
Პრეს-ნაკურნის მანქანა
-
 Როლინგის მაშინა
Როლინგის მაშინა
-
 Ჰიდრაულიკური ღირებულების მაशინი
Ჰიდრაულიკური ღირებულების მაशინი
-
Საყრდენი ჰიდრავლიკური პრესის მანქანა
-
Ოთხ სვეტიანი ჰიდრავლიკური პრესის მანქანა
-
Ორმაგი მოქმედების გაჭიმვის ჰიდრავლიკური პრესის მანქანა
-
Ოთხ სვეტიანი გაჭიმვის ჰიდრავლიკური პრესის მანქანა
-
Საყრდენი გაჭიმვის ჰიდრავლიკური პრესის მანქანა
-
Ერთ სვეტიანი ჰიდრავლიკური პრესის მანქანა
-
Სადედა საწვავის ჰიდრავლიკური პრესის მანქანა
-
Სრულად ავტომატური ფხვნილის ფორმირების ჰიდრავლიკური პრესის მანქანა
-
Მანქანის გრძივი ბევრის ფორმირების ჰიდრავლიკური პრესის მანქანა
-
Თავისუფალი კოვკის ჰიდრავლიკური პრესის მანქანა
-
Თავის ფორმირების ჰიდრავლიკური პრესის მანქანა
-
Მანქანის კარის ჰემინგის ჰიდრავლიკური პრესის მანქანა
-
Შიდა ნაწილების ჰიდრავლიკური პრესის მანქანა და წარმოების ხაზი
-
Კვლევა და კონფიგურაცია ჰიდრავლიკური პრესის მანქანა
-
-
 Ვარდის მაშინი
Ვარდის მაშინი
-
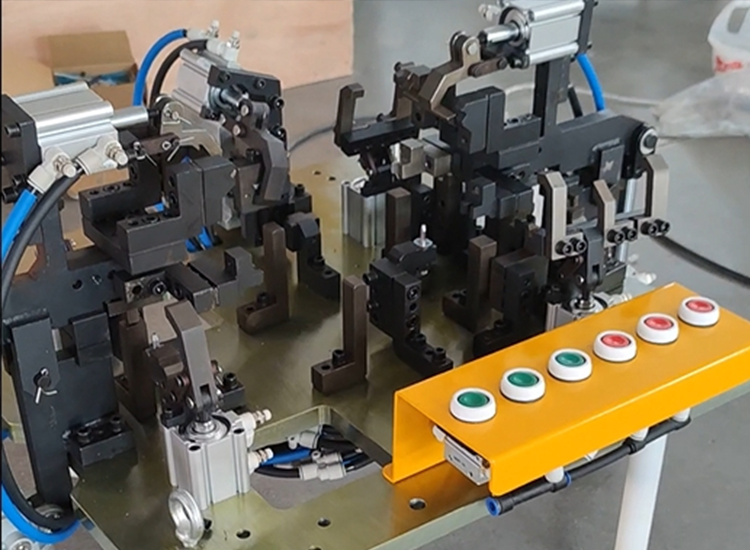
 Რობოტის მუხლი
Რობოტის მუხლი


- Გენერალური ინფორმაცია
- Რეკომენდებული პროდუქტები
| Წარმოშობის ადგილი: | Ჩინეთი |
| Ბრენდის სახელი: | WEILI |
| Სერტიფიკაცია: | ISO9001 |
| Მინიმალური შეკვეთის რაოდენობა: | 1 |
| Ფასი: | Მოდელის ნომერზე დამოკიდებულებით |
| Შეფუთვის დეტალები: | Ხის ყუთი, წყალგამძლე |
| Მიწოდების დრო: | 20 დღე |
| Გადახდის პირობები: | წინასწარ 30% ანაბრი, დარჩენილი 70% გადახდილი უნდა იქნეს მიწოდებამდე |
| Მიწოდების შესაძლებლობა: | Მაღალი დონის წარმოების შესაძლებლობები დიდი მასშტაბის ორდერებისთვის |
Აღწერა
Შედუღების რობოტები ინდუსტრიული ავტომატიზაციის სფეროში ვარსკვლავებია და ფართოდ გამოიყენებიან ავტომომსახურების, საზღვაო შენობების, აეროკოსმოს და მძიმე მანქანათმშენებლობის სფეროებში. ისინი შეიძლება ეფექტურად და ზუსტად შეასრულონ შედუღების დავალებები, რაც მნიშვნელოვნად ამაღლებს წარმოების ეფექტურობას და პროდუქტის ხარისხს. შედუღების რობოტები შეიძლება დაყოფილ იქნას სხვადასხვა ტიპებად სხვადასხვა კრიტერიუმის მიხედვით.
Სტრუქტურული ფორმით დაჯგუფებული
1. შეღწევადი ტიპის შემხვევი რობოტი: აღჭურვილია რამდენიმე შეღწევადი ღერძით, რომელიც ადამიანის ხელის მსგავსია, ამ რობოტებს ახასიათებთ მაღალი მოქნილობა და ადაპტაციის უნარი, რაც საშუალებას აძლევს მათ შეასრულონ რთული შემხვევის მუშაობა. ჩვეულებრივ, ისინი აღჭურვილი არიან ზუსტი სენსორებითა და კონტროლის სისტემებით, რათა უზრუნველყონ სიზუსტე და სტაბილურობა შემხვევის პროცესში.
2. მართკუთხა კოორდინატის ტიპის შემხვევი რობოტი: მოძრაობს სამ ერთმანეთის მართობულ ღერძზე, რის შედეგადაც ქმნის მართკუთხა კოორდინატთა სისტემას. ისინი შესაფერისია წრფივი ან მარტივი მრუდი შემხვევის მუშაობის შესრულებისთვის. სტრუქტურა მარტივია და ღირებულება დაბალი, რაც ხდის მათ შესაფერისს მასობრივ წარმოების გარემოში მარტივი შემხვევის ოპერაციებისთვის.
3. ცილინდრული კოორდინატის ტიპის შემხვევი რობოტი: მოძრაობს ვერტიკალურ და ჰორიზონტალურ ღერძზე, დამატებითი შემბრუნებელი ღერძით. ის შესაფერისია წრიული ან სპირალური შემხვევის მუშაობის შესრულებისთვის, მაგალითად, მილებისა და კონტეინერების მსგავსი ცილინდრული ობიექტების შემხვევისთვის.
Კლასიფიკაცია გამოყენების სფეროების მიხედვით
1. წერტილოვანი შედუღების რობოტი: გამოიყენება ძირითადად წერტილოვანი შედუღების მისიების შესრულებისთვის, შესაფერისია თხელფიროვანი ფირების შედუღებისთვის ავტომობილების წარმოებისა და საყოფაცხოვრებო ტექნიკის მრეწანეობის სფეროში. ისინი ჩვეულებრივ გამოირჩევიან მაღალი შედუღების სიჩქარით და სიზუსტით, რაც შეესაბამება მასობრივი წარმოების მოთხოვნებს.
2. არკის შედუღების რობოტი: გამოიყენება ძირითადად არკის შედუღების მისიების შესრულებისთვის, როგორიცაა ხელით შედუღება და აირით დამცავი შედუღება. ისინი შესაფერისია სხვადასხვა მასალის, მეტალებისა და შენადნობების შედუღებისთვის და ხშირად აღჭურვილი არიან ავტომატური სადუღარი საწოლის მიმაგრების სისტემებითა და სადუღარი ძაბვის წყაროებით, რათა უზრუნველყოთ სტაბილური შედუღების პროცესი.
3. ლაზერული შედუღების რობოტი: იყენებს ლაზერულ სხივს შედუღებისთვის, რაც უზრუნველყოფს მაღალ სიზუსტეს, სიჩქარეს და ეფექტურობას. ისინი შესაფერისია მაღალი სიზუსტისა და ხარისხის შედუღების მისიებისთვის ელექტრონიკისა და ზუსტი ხელსაწყოების მრეწანეობის სფეროში.
Კლასიფიკაცია კონტროლის მეთოდის მიხედვით
Სწავლების და გამეორების ტიპის შემდუღებელი რობოტი: ხელით სწავლების გამოყენებით, შემდუღების ტრაექტორია, სიჩქარე და პოზიციის ინფორმაცია ინახება რობოტის კონტროლის სისტემაში. ფაქტობრივი შედუღების პროცესში რობოტი აღდგენს სწავლების პროცესს შენახული ინფორმაციის საფუძველზე, რათა დაასრულოს შედუღების დავალება. ასეთი ტიპის რობოტები მარტივად იყენება და მარტივად ისწავლება, თუმცა შეიძლება შეზღუდული იყოს მათი ადაპტაცია რთული და ცვალებადი შედუღების დავალებებისთვის.
Განსხვავებული ტიპის შემდუღებელი რობოტები თითოეულს აქვს საკუთარი უპირატესობები, ხოლო სწორი რობოტის არჩევა, რომელიც შეესაბამება კონკრეტულ საჭიროებებს, მნიშვნელოვანია წარმოების ეფექტიანობის გაუმჯობესებისთვის.