ALLE PRODUKTE
-
 Abwickel- und Nivelliermaschine
Abwickel- und Nivelliermaschine
-
 Schneidemaschine
Schneidemaschine
-
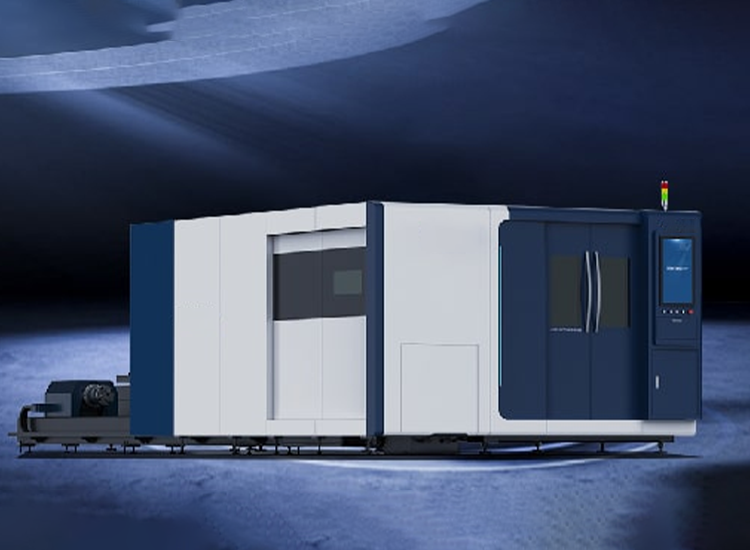
 Laserschneidmaschine
Laserschneidmaschine
-
 Pressebremse
Pressebremse
-
 Walzmaschine
Walzmaschine
-
 Hydraulische Pressemaschine
Hydraulische Pressemaschine
-
Gestantriebs-Pressmaschine
-
Viersäulen-Pressmaschine
-
Doppeltwirkende Streckpressmaschine
-
Viersäulen-Streckpressmaschine
-
Gestreckpressmaschine
-
Einzelständer-Pressmaschine
-
Drahtwickel-Pressmaschine
-
Vollautomatische Pulverpressmaschine
-
Fahrzeuglängsträger-Formpressmaschine
-
Freiformschmiedepresse
-
Kopfbereich-Formpressmaschine
-
Fahrzeugtür-Kantpressemaschine
-
Innenteile-Hydraulikpressmaschine & Produktionslinie
-
Forschungs- & Konfigurationshydraulikpressmaschine
-
-
 Schweißmaschine
Schweißmaschine
-
 Roboterarm
Roboterarm
- Überblick
- Empfohlene Produkte
| Herkunftsort: | China |
| Markenname: | Weili |
| Zertifizierung: | ISO9001<br> |
| Mindestbestellmenge: | 1 |
| Preis: | Abhängig von der Modellnummer |
| Verpackungsdetails: | Holzkiste, wasserdicht |
| Lieferzeit: | 20 Tage |
| Zahlungsbedingungen: | 30 % Anzahlung, Zahlung des 70 % Restbetrags vor Auslieferung |
| Lieferfähigkeit: | Fortgeschrittene Fertigungskapazitäten für Großaufträge |
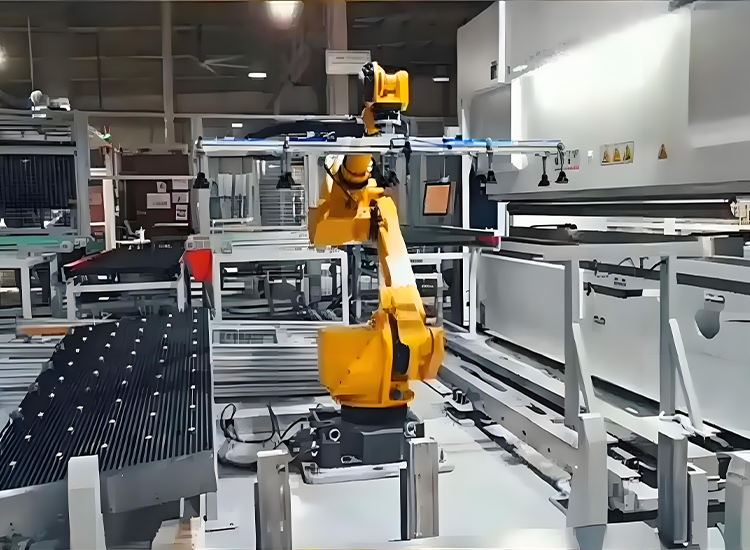
Beschreibung
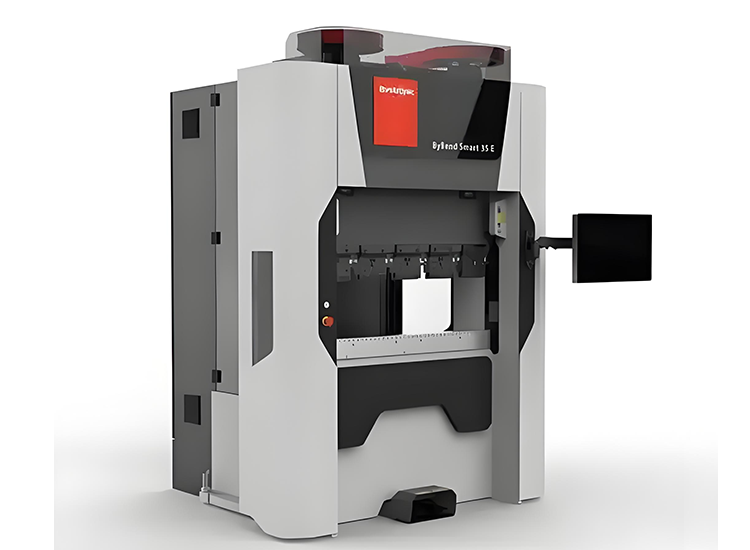
Die Biegemaschinenhand ist eine automatisierte Vorrichtung zum Biegen von Metallblechen in verschiedene Formen. Sie ermöglicht effiziente und präzise Biegevorgänge. Das Arbeitsprinzip dieser Maschinenhand basiert hauptsächlich auf einer Reihe präziser mechanischer Bewegungen und Sensorsteuerung, um das Metallblech in der Form zu positionieren und Druck auszuüben, um es in die gewünschte Form zu biegen.
Die Biegemaschine zeichnet sich durch hohe Präzision, Effizienz und Anpassungsfähigkeit aus. Sie kann unterschiedliche Formen von Metallblechen verarbeiten, indem einfach die Form gewechselt wird. Sie kommt weitläufig in Branchen wie der Automobilindustrie, Luft- und Raumfahrt, Elektronik und im Bauwesen zum Einsatz. Durch den Einsatz fortschrittlicher mechanischer Konstruktionen und Technologien kann der Bieroboter eine präzise Steuerung und Bearbeitung von Metallblechen erreichen und dadurch die Produktionsleistung sowie die Produktqualität verbessern.
Wettbewerbsvorteil
Als zentrale Ausführungskomponente ist die CNC-Abkant-Flexbearbeitungseinheit eine hochautomatisierte Gerätekombination, die sich durch hohe Effizienz, hohe Qualität und hohe Flexibilität auszeichnet. Bei der Abkant-Flexbearbeitungseinheit kann durch die Auswahl einer geeigneten Kombination von Komponenten eine bessere Unterstützung für Bearbeitungseffizienz und -flexibilität gewährleistet werden. Die Biegegenauigkeit hängt von der Präzision der Abkantpresse selbst, der Positioniergenauigkeit des Roboterarms sowie der koordinierten Steuerung zwischen Roboterarm und Abkantpresse ab. Die Schwierigkeit der koordinierten Steuerung liegt in der Abstimmung der Geschwindigkeit von Roboterarm und Abkantpresse sowie in der Bewegungsbahn des Roboterarms, der das Werkstück unterstützt. Eine schlechte Nachführleistung beeinträchtigt erheblich den Formgebungseffekt des Biegewinkels und die Flachheit der Plattenoberfläche und wirkt sich somit negativ auf die Qualität des Endprodukts aus.