ALLE PRODUCTEN
-
 Spoelvlakmachine
Spoelvlakmachine
-
 Schuurs Machine
Schuurs Machine
-
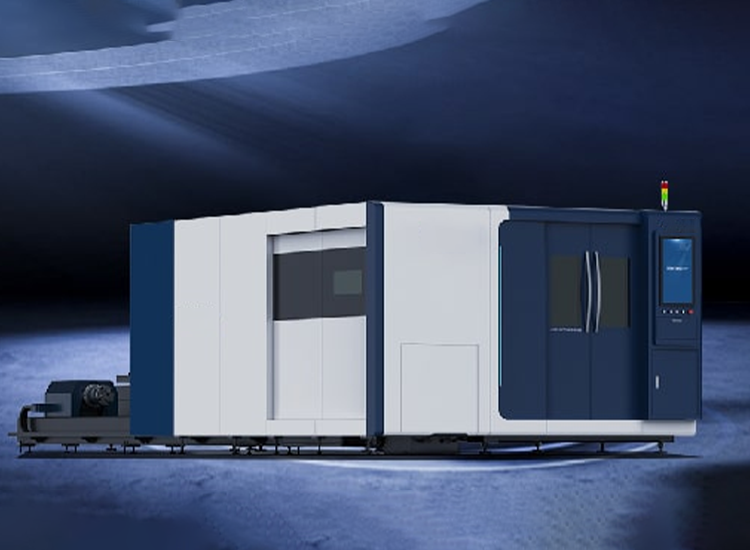
 Laser Snijmachine
Laser Snijmachine
-
 Drukpers Machine
Drukpers Machine
-
 Rolmateriaal Machine
Rolmateriaal Machine
-
 Hydraulische Drukpers Machine
Hydraulische Drukpers Machine
-
Frame hydraulische persmachine
-
Vierkolom hydraulische persmachine
-
Dubbelwerkzame rekhydraulische persmachine
-
Vierkolom rekhydraulische persmachine
-
Frame rekhydraulische persmachine
-
Enkelkolom hydraulische persmachine
-
Draadwikkelaar hydraulische persmachine
-
Volledig automatische poedercompacterende hydraulische persmachine
-
Langsprofielvormende hydraulische persmachine voor auto's
-
Vrij vormgevende hydraulische persmachine
-
Kopvormende hydraulische persmachine
-
Helft-vouwende hydraulische persmachine voor autodeuren
-
Hydraulische persmachine & productielijn voor interieuronderdelen
-
Onderzoek & configuratie hydraulische persmachine
-
-
 Lastleermachine
Lastleermachine
-
 Robotarm
Robotarm
- Overzicht
- Aanbevolen producten
| Plaats van oorsprong: | China |
| Merknaam: | Weili |
| Certificering: | ISO9001 |
| Minimale bestelhoeveelheid: | 1 |
| Prijs: | Afhankelijk van het modelnummer |
| Verpakkingsdetails: | Houten kist, waterdicht |
| Levertijd: | 20 dagen |
| Betaalvoorwaarden: | 30% aanbetaling, resterende 70% vóór levering |
| Leveringscapaciteit: | Geavanceerde productiemogelijkheden voor grootschalige orders |
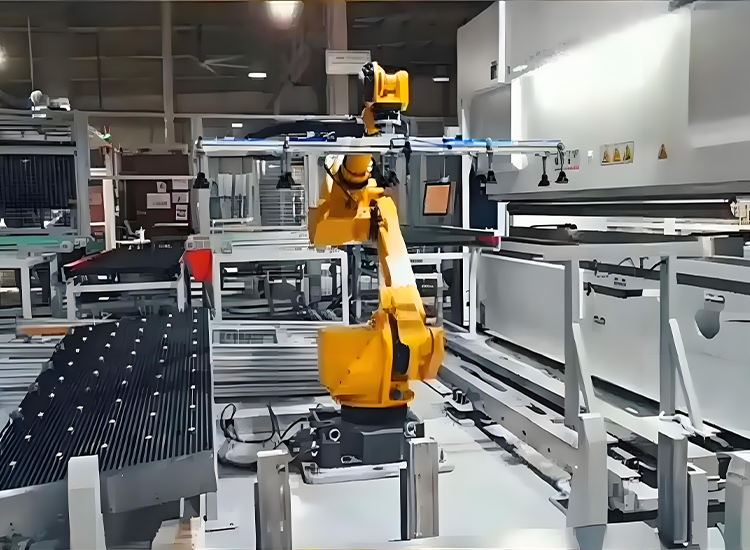
Beschrijving
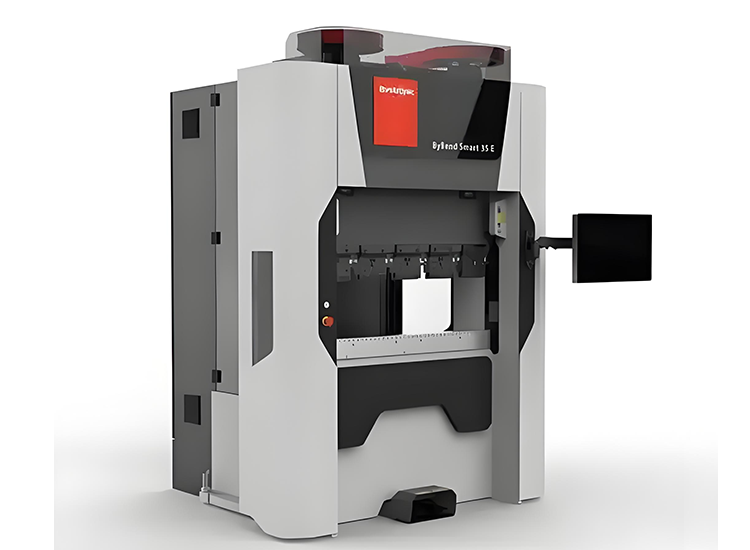
De buigmachine arm is een geautomatiseerd apparaat dat wordt gebruikt om metalen platen in verschillende vormen te buigen. Het zorgt voor efficiënte en nauwkeurige buigbewerkingen. Het werkbeginsel van deze machine-arm is voornamelijk gebaseerd op een reeks precieze mechanische bewegingen en sensorbesturing om de metalen plaat in de mal te positioneren en druk uit te oefenen om deze in de gewenste vorm te buigen.
De buigmachine hand beschikt over hoge precisie, efficiëntie en aanpasbaarheid. Het kan verschillende vormen van metalen platen verwerken door eenvoudig de matrijs te wisselen. Het wordt veel gebruikt in industrieën zoals automotive, lucht- en ruimtevaart, elektronica en bouw. Door gebruik te maken van geavanceerd mechanisch ontwerp en technologie kan de buigrobot een nauwkeurige besturing en bewerking van metalen platen realiseren, waardoor de productie-efficiëntie en productkwaliteit worden verbeterd.
Concurrentievoordeel
Als de kernuitvoerende component is de CNC-plooi flexibele bewerkingsunit een zeer geautomatiseerde combinatie van apparatuur, gekenmerkt door hoge efficiëntie, hoge kwaliteit en hoge flexibiliteit. Bij de plooiflexibele bewerkingsunit kan het selecteren van de juiste combinatie van componenten betere ondersteuning bieden voor de bewerkingsefficiëntie en flexibiliteit. De plooinauwkeurigheid hangt af van de precisie van de plooiinstallatie zelf, de positioneernauwkeurigheid van de robotarm en de gecoördineerde besturing tussen de robotarm en de plooiinstallatie. De moeilijkheid van gecoördineerde besturing ligt in het aanpassen van de snelheid van de robotarm en de plooiinstallatie, evenals de bewegingsbaan van de robotarm die het werkstuk ondersteunt. Slechte volgprestaties beïnvloeden aanzienlijk het vormgevingseffect van de plooihoek en de vlakheid van het plaatoppervlak, waardoor de kwaliteit van het eindproduct wordt aangetast.