ԲՈԼՈՐ ԱՊՐԱՆՔՆԵՐԸ
-
 Շրջանակի Հարթեցման Մեքենա
Շրջանակի Հարթեցման Մեքենա
-
 Սահքման Մաքինա
Սահքման Մաքինա
-
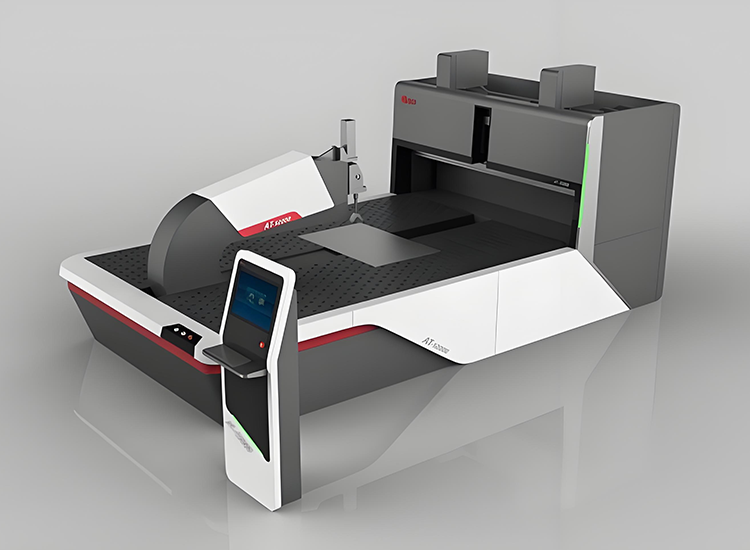
 Լազերային սարքող մաքինա
Լազերային սարքող մաքինա
-
 Պրեսս-Շտամպ Մեքենա
Պրեսս-Շտամպ Մեքենա
-
 Ռոլինգ Մեքենա
Ռոլինգ Մեքենա
-
 Հիդրավլիկ մեքենա
Հիդրավլիկ մեքենա
-
Շրջանակային հիդրավլիկ մեքենա
-
Չորս սյունային հիդրավլիկ մեքենա
-
Կրկնակի գործողության ձգման հիդրավլիկ մեքենա
-
Չորս սյունային ձգման հիդրավլիկ մեքենա
-
Շրջանակային ձգման հիդրավլիկ մեքենա
-
Մեկ սյունակ հիդրավլիկ պրես մեքենա
-
Թել փաթաթող հիդրավլիկ պրես մեքենա
-
Լիարժեք ավտոմատ փոշի ձևավորող հիդրավլիկ պրես մեքենա
-
Ավտոմեքենայի երկայնական բալկա ձևավորող հիդրավլիկ պրես մեքենա
-
Ազատ կովկասյան հիդրավլիկ պրես մեքենա
-
Գլխի ձևավորման հիդրավլիկ պրես մեքենա
-
Ավտոմեքենայի դուռ հեմմինգ հիդրավլիկ պրես մեքենա
-
Ավտոմեքենայի ներքին մասերի հիդրավլիկ պրես մեքենա և արտադրական գիծ
-
Հետազոտություն և կոնֆիգուրացիա հիդրավլիկ պրես մեքենա
-
-
 Միացնող մաքինա
Միացնող մաքինա
-
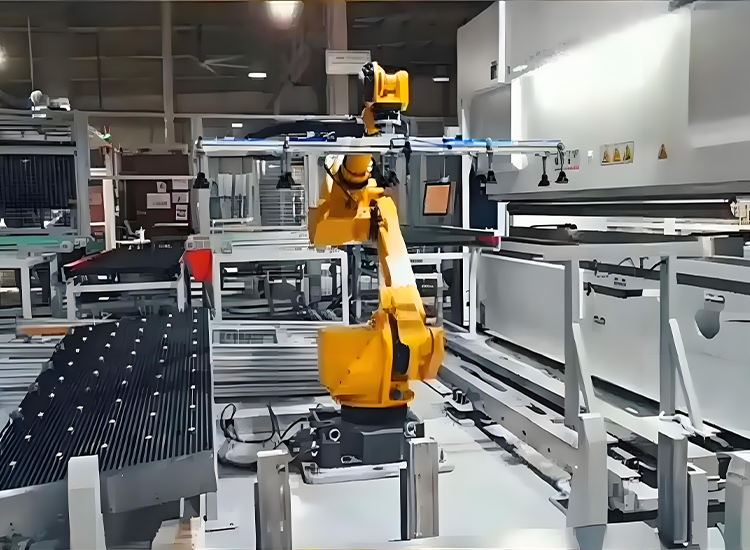
 Ռոբոտային Բազուկ
Ռոբոտային Բազուկ

- Ընդհանուր տեղեկություն
- Համարվող ապարատներ
| Ծագման վայր: | Չինաստան |
| Բրենդի անուն: | WeiLi |
| Սերտիֆիկացում: | ISO9001 |
| Minimum Order Quantity: | 1 |
| 📐 | Կախված մոդելի համարից |
| Պատվիրման մանրամասները. | Փայտե տուփ, ջրակայուն |
| Առաքման ժամանակ: | 20 օր |
| Վճարման պայմանները. | ներդրում 30%, վճարել 70% մնացորդը առաքման նախորդ |
| Մատակարարման կարողություն: | Գերազանց արտադրական հնարավորություններ խոշոր պատվերների համար |
Նկարագրություն
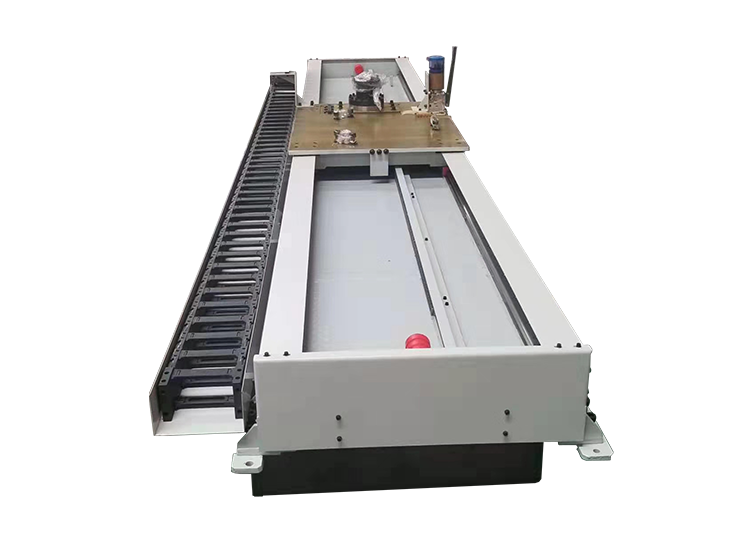
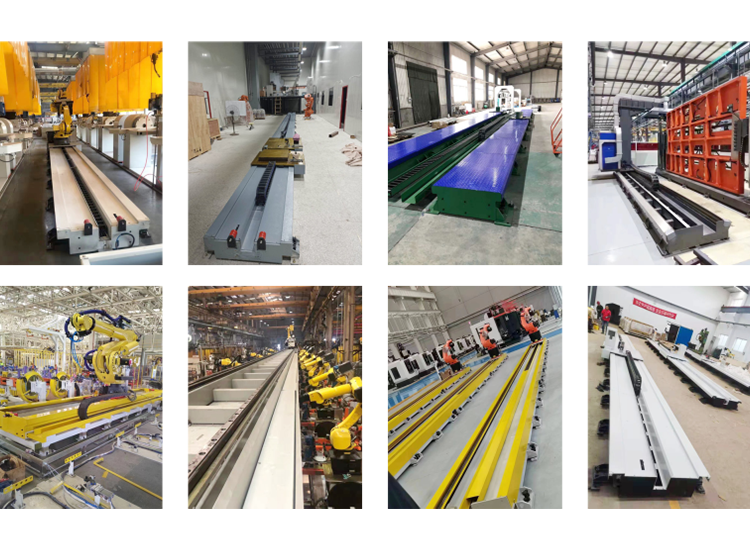
Յոթերորդ առանցքի ակնարկ ·
Յոթերորդ առանցքը բաժանվում է երեք տեսակի՝ ըստ տեղադրման ձևի՝ բաց յոթերորդ առանցք, փակ յոթերորդ առանցք և կիսափակ յոթերորդ առանցք։ ·
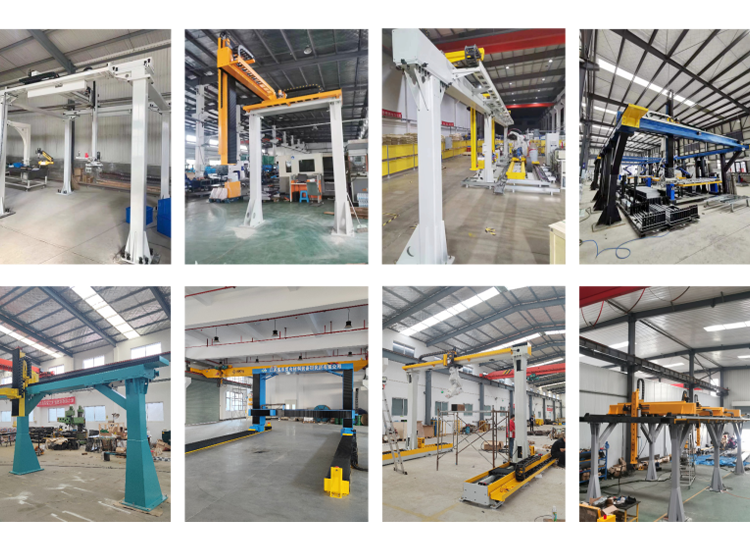
Ռոբոտների համար նախատեսված յոթերորդ առանցքը աշխատում է արդյունաբերական ռոբոտների հետ համատեղ՝ ապահովելով հորիզոնական շարժումը։ Արդյունաբերական ռոբոտը կատարում է ամբողջ արտադրական գործընթացը՝ ներառյալ բեռնումը, ամրացումը և բեռնաթափումը, ինչը զգալիորեն բարձրացնում է մշակվող մասերի որակն ու էստետիկան։ ·
Այն լուծում է այն արտադրանքների որակի անկայունության հարցը, որոնք նախկինում մանրամասն էին մշակվում: Ռոբոտների համար սահմանված յոթերորդ առանցքը օգտագործում է լիարժեք սերվո-վարող ուժային համակարգ, որն ապահովում է բարձր արագություն, ճշգրտություն և փոշու ու կեղտի նկատմամբ հիանալի դիմադրություն:
Այն բավարարում է գործարանների ավտոմատացված արտադրային գծերի իրական կարիքները, ներառյալ մետաղակտրական սարքերի վրա մասերի տեղադրումն ու հանումը, կառուցումը, փոշորացումը, ստուգումը, մետաղաձուլությունը, կովկացումը, ջերմային մշակումը, մետաղի կտրումը, ինչպես նաև նյութերի տեղափոխումն ու փաթեթավորումը:
Մատակարարումներ
| Մոդելի տեխնիկական բնութագրեր | Մարմնի լայնություն (մմ) | Բեռի տիրույթ (տ) | Կրկնության դիրքավորման ճշտություն (մմ) | Լծակի ընթացք (մ) | Առավելագույն արագություն (մմ/վ) | ԼՈՒԲՐԻԿԱՑԻԱՅԻ SISTԵՄ | Սենսորային կետերի քանակ (զրո, դրական, բացասական) |
| JY100-T500 | 500 | 0.1-0.5 | ±0.05 | 2-100 | 1500 | Պինդ ավտոմատ | 3 |
| JY100-T1500 | 700 | 0.5-1.5 | ±0.05 | 2-100 | 1000 | Պինդ ավտոմատ | 3 |
| JY100-T3000 | 800 | 1.5-3.0 | ±0.05 | 2-100 | 1000 | Պինդ ավտոմատ | 3 |
Մրցակցային առավելություն
| Վարելու մեթոդ | Վարելու մեթոդ | Սերվո մեթոդ |
| Грузоподъемность | Մաքսին բեռի կարողություն | 0.5-6T (Ոչ ստանդարտ) |
| Գործառույթ և կիրառում | Օպերացիա Տիպ | Շինարարական մեքենաներ |
| Ճշգրտություն | Կրկնվող դիրքավորման ճշգրտություն | ±0.05մմ |
| Հանդիպակ | Անհրաժեշտ արագություն | 0-60մ/րոպե |
| Պաշտպանության հատկություններ | Պաշտպանության մակարդակը | IP40 |
| Կայանի կոնֆիգուրացիա | Կայանների ընդհանուր քանակը | Պատվիրատուի պահանջով (ոչ ստանդարտ) |
| Ապակետման միջոց | Անկաթիլ ռեժիմ | Կիսափակ / Լրիվ փակ / Հարմոնիկայի ծածկ |
| Ուռուցքային կաթված | Արդյունավետ ճնշում | Ազատ միացում |
| Պահպանություն | Պահպանման մեթոդ | Լրիվ ավտոմատ յուղման համակարգ |
① Պատվերով սպասարկում՝ հատուկ նախագծում, տեղում տեղադրում և կարգաբերում։
② Շատ երկար քայլ՝ կարող է ազատ միացվել և ձգվել մինչև առավելագույնը 100 մետր երկարությամբ։
③ Ռազմական ստանդարտի որակ՝ երկու փուլային ժամանակահարձակման մշակում, որի ժամանակ ապացուցվել է, որ կարող է աշխատել մինչև 100,000 ցիկլ։
④ Խելացի յուղում՝ լրիվ ավտոմատ յուղման համակարգ, ձեռքով սպասարկում չի պահանջվում։
⑤ Բազմակի պաշտպանություն՝ IP40 պաշտպանության մակարդակ. անկաթիլ կառուցվածք՝ հարմոնիկայի ծածկով։
⑥ Արագ պատասխան՝ 1,5 մ/վ արագություն. ճշգրիտ միացում և անջատում՝ 0,1 վայրկյանի ճշգրտությամբ։